
M2BAX180MLB4 B3 22KW(3GBA182420-ADCCN)
M2BAX250SMA4 B3 55KW + VC376
M2BAX180MLA4 B3 18.5KW + VC376
M2BAX80MB4 B5 0.75KW
M2BAX132SB2 B3 7.5KW
M2BAX280SMB4 V1 Stator ກັບ PTC ມີພອດນໍ້າມັນ
M2BAX90LA4 B5 1.5KW
M2BAX132SA4 B5 5.5KW+VC209+VC376
M2BAX80MA6 B5 0.37KW+VC209+VC376
M2BAX250SMA4 B3 55KW
M2BAX280SA4 B3 75KW + VC376
M2BAX100LB4 B35 3KW+VC009
M2BAX225SMA4 B35 37KW+VC009
M2BAX132SB2 B5 7.5KW+VC209+VC002
M2BAX112MA4 B5 4KW+VC209+VC002
M2BAX160MLA4 B35 11KW+VC009
M2BAX180MLB4 B3 22KW+VC002
M2BAX315MLA4 B3 200KW+VC180
M2BAX100LA6 B5 1.5KW(3GBA103510-BSCCN)
M2BAX160MLA4 B3 11KW
M2BAX225SMA4 B3 37KW+VC002

M2BAX112MA6 B3 2.2KW
M2BAX71MA4 B34 0.25KW+VC008+VC540
M2BAX160MLB4 B3 15KW+VC002
M2BAX160MLB2 B3 15KW+VC002
M2BAX315SMA6 B3 75KW+VC002
M2BAX132MA4 B3 7.5KW+VC002
M2BAX180MLA2 B3 22KW+VC002
M2BAX315SMA4 B3 110KW+VC002
M2BAX315SMC4 B3 160KW+VC002
M2BAX160MLA4 B3 11KW+VC002
M2BAX200MLA6 B3 18.5KW+VC002
M2BAX180MLA4 B3 18.5KW+VC002
M2BAX160MLC2 B3 18.5KW+VC002
M2BAX132MA6 B3 4KW+VC002
M2BAX71MA2 B3 0.37KW
M2BAX71MA2 B5 0.37KW
M2BAX71MB2 B3 0.55KW
M2BAX180MLA6 B5 15KW
M2BAX225SMA4 B3 37KW
M2BAX112MA4 B3 4KW
M2BAX180MLA4 B3 18.5KW
M2BAX200MLA4 B5 30KW
M2BAX180MLB4 B5 22KW
M2BAX315MLA4 B3 200KW
M2BAX280SA4 B3 75KW
M2BAX132MA4 B5 7.5KW
M2BAX160MLB4 B5 15KW
M2BAX180MLA4 B5 18.5KW
M2BAX100LA4 B3 2.2KW
M2BAX100LB4 B3 3KW
M2BAX100LB4 B5 3KW
M2BAX112MA4 B5 4KW
M2BAX132SA4 B3 5.5KW
M2BAX80MB4 B3 0.75KW
M2BAX90LA4 B3 1.5KW
M2BAX90LA4 B5 1.5KW
M2BAX100LA4 B5 2.2KW
M2BAX160MLA4 B5 11KW
M2BAX160MLB4 B3 15KW
M2BAX100LA4 B5 2.2KW
M2BAX71MA4 B3 0.25KW
M2BAX90SA4 B3 1.1KW
M2BAX132MA4 B3 7.5KW
M2BAX225SMB4 B35 45KW
M2BAX225SMB4 B5 45KW
M2BAX225SMB4 B3 45KW
M2BAX132MA4 B35 7.5KW(3GBA132310-ADCCN)+VC009
M2BAX90SA4 B5 1.1KW
M2BAX80MA4 B3 0.55KW
M2BAX71MA4 B5 0.25KW
M2BAX132SA4 B5 5.5KW
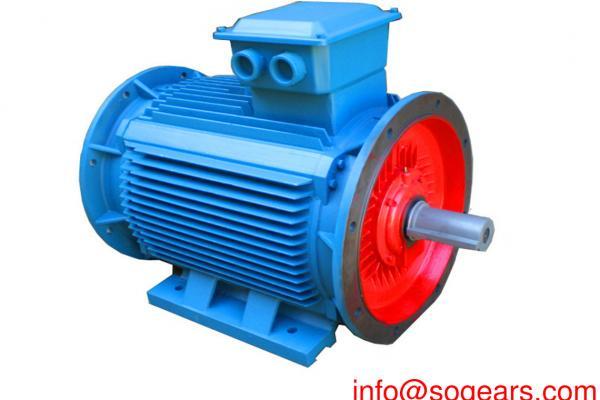
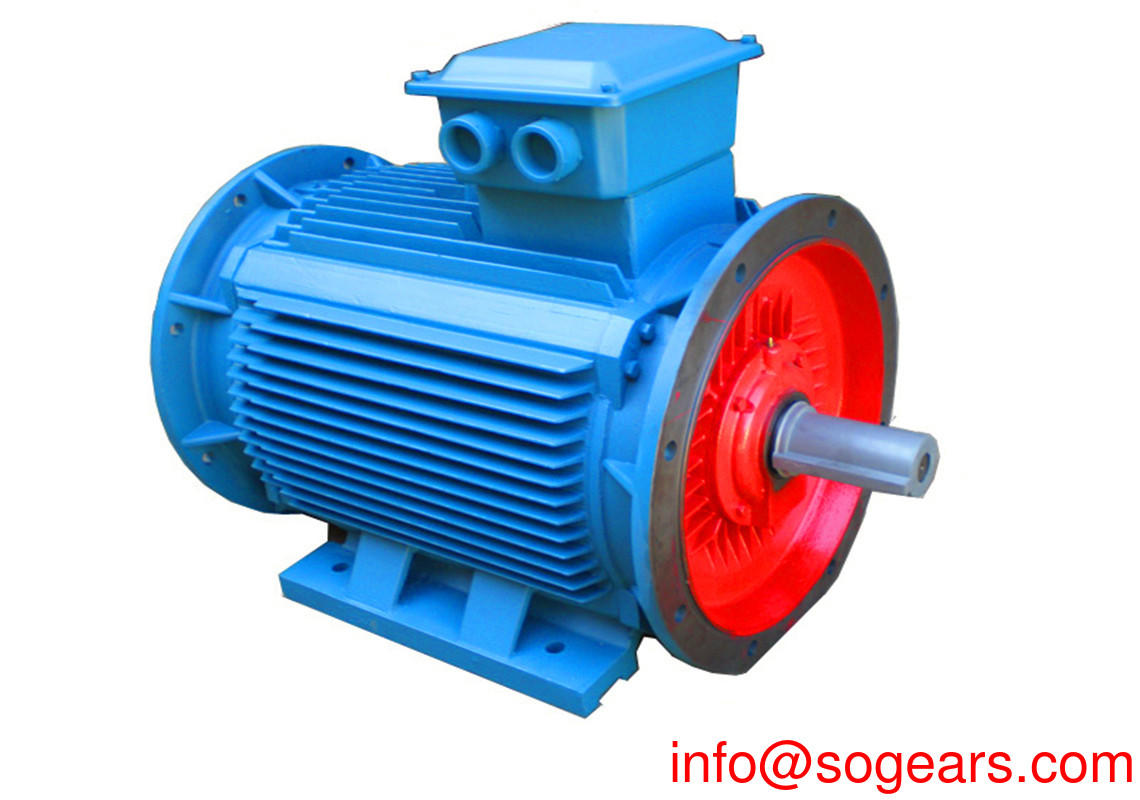
ຜົນຜະລິດທີ່ໄດ້ຮັບການໃຫ້ຄະແນນພະລັງງານທີ່ຖືກຈັດອັນດັບຂອງມໍເຕີ MABAX series ໝາຍ ເຖິງມໍເຕີທີ່ປະຕິບັດງານພາຍໃຕ້ລະບົບປະຕິບັດການ s1- ຕໍ່ເນື່ອງ (IEC 60034-1), ເມື່ອອຸນຫະພູມອາກາດຢູ່ -20 ° c ~ 40 ° c ແລະຄວາມສູງບໍ່ເກີນ 1000m.Voltage , ຄວາມຖີ່
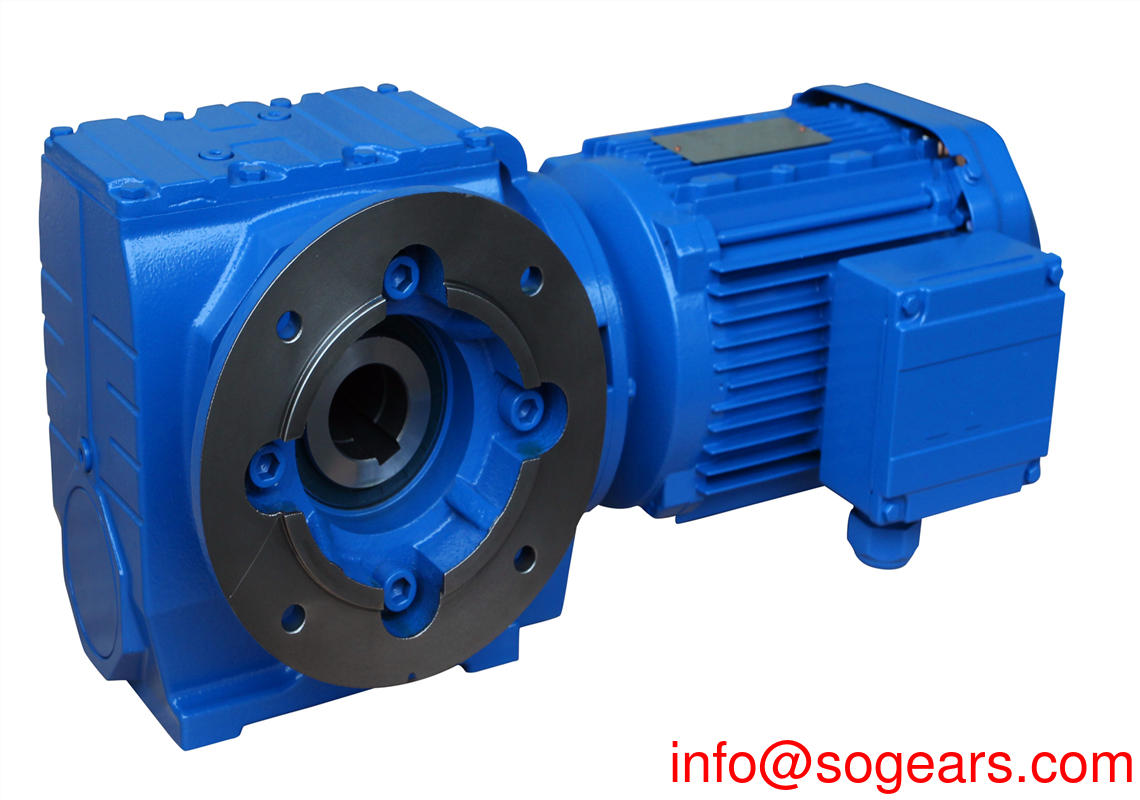
ມໍເຕີລຸ້ນ M2BAX ແມ່ນ ນຳ ເຂົ້າມາທີ່ແບກຫາບ NSK, ໝີ ຍີ່ຫໍ້ SKF, ມໍເຕີທຸກລຸ້ນໃນ ໝໍ້ ລັອກລັອກແບບມາດຕະຖານ d-end. ລະດັບການປ້ອງກັນການອອກແບບຜະລິດຕະພັນ IP55, ແລະຕອບສະ ໜອງ ການປັບແຕ່ງ IP56, IP65. ຕອບສະ ໜອງ ການຕັ້ງຄ່າການຄັດເລືອກລະຫັດຕົວປ່ຽນແບບໂມເດວຫລາຍສິບເຄື່ອງ, ຕອບສະ ໜອງ ໄດ້ຢ່າງເຕັມສ່ວນກັບການ ນຳ ໃຊ້ຫລາຍໆແອນໂກ້ທົ່ວໄປຂອງ motors ເອີ້ນວ່າ M2BAX series motors ຂະບວນການທົ່ວໄປ, ເຊິ່ງທຽບເທົ່າກັບມໍເຕີ ທຳ ມະດາໃນປະເທດຈີນ. ໃນແງ່ຂອງການຊົມໃຊ້ພະລັງງານ, ພວກມັນແມ່ນ IE2 - ທຽບເທົ່າກັບຊັ້ນ 3 ຂອງມາດຕະຖານການໃຊ້ພະລັງງານຂອງສະບັບປີ 2012 ທີ່ປະເທດຈີນ, ແລະທຽບເທົ່າກັບມໍເຕີລຸ້ນ YX3 ແລະ YE2 ໃນປະເທດຈີນ.
IEC 60034-1 ກຳ ນົດຜົນກະທົບຂອງການເພີ່ມອຸນຫະພູມຕໍ່ແຮງດັນໄຟຟ້າແລະຄວາມຖີ່. ມາດຕະຖານແບ່ງປັນການປ່ຽນແປງຂອງແຮງດັນໄຟຟ້າແລະຄວາມຖີ່ໃນເຂດ A ແລະ B. ພື້ນທີ່ A ແມ່ນຄວາມບ່ຽງເບນແຮງດັນໄຟຟ້າ +/- 5% ແລະຄວາມຖີ່ຂອງການປ່ຽນແປງ +/- 2%; ພື້ນທີ່ B ແມ່ນ ສຳ ລັບຄວາມຖີ່ຂອງແຮງດັນໄຟຟ້າ +/- 10% ແລະຄວາມຖີ່ຂອງການປ່ຽນແປງ +3% / - 5%.
ມໍເຕີທັງສອງສາມາດສະ ໜອງ ແຮງບິດທີ່ໄດ້ຮັບການປະເມີນໃນເຂດ A ແລະ B, ແຕ່ວ່າການເພີ່ມອຸນຫະພູມຈະສູງກ່ວາແຮງດັນແລະຄວາມຖີ່. ມໍເຕີແມ່ນອະນຸຍາດໃຫ້ແລ່ນພຽງໄລຍະສັ້ນໆໃນເຂດ B.
ມໍເຕີແຮງດັນຕ່ ຳ ໝາຍ ເຖິງມໍເຕີທີ່ມີແຮງດັນໄຟຟ້າຕໍ່າກ່ວາ 1000V.
ອັນທີ່ເອີ້ນວ່າແຮງດັນຕ່ ຳ ແມ່ນການອ້າງອີງໃສ່ແຮງດັນໄຟຟ້າ ac ຕ່ ຳ ກວ່າ 1000V, ແລະໃນນີ້ພວກເຮົາເວົ້າວ່າແຮງດັນທົ່ວໄປຂອງມໍເຕີແມ່ນ ac 380V, ຫຼື 440V ຫຼື 660V ແລະຫລາຍຊັ້ນຂອງມໍເຕີ asynchronous.
ມໍເຕີ Asynchronous ແມ່ນກ່ຽວຂ້ອງກັບມໍເຕີ synchronous, ສູດຄິດໄລ່ຄວາມໄວຂອງເຄື່ອງຈັກ synchronous ຂອງ n = 60 f / p ສຳ ລັບຄວາມຖີ່ຂອງພະລັງງານ f, p ສຳ ລັບມໍເຕີຂອງໂລກາລີນ, ແຕ່ນີ້ແມ່ນທິດສະດີຂອງຄວາມໄວ ໝູນ ວຽນ, ເຄື່ອງຈັກທົ່ວໄປຈະມີຄວາມກະລຸນາໃນການ ກຳ ຈັດພາຍນອກ ຜົນບັງຄັບໃຊ້, ເຮັດໃຫ້ຄວາມໄວຂອງມໍເຕີຕົວຈິງແມ່ນຕໍ່າກ່ວາສູດຂ້າງເທິງຂອງຄວາມໄວມໍເຕີ, ເຊິ່ງເອີ້ນວ່າມໍເຕີ. ນັ້ນແມ່ນການເວົ້າວ່າມັນມີຄວາມແຕກຕ່າງກັນລະຫວ່າງພວກມັນ, ນອກຈາກການຊິ້ງ!
ການປ້ອງກັນແລະຄວບຄຸມ TDHD ໃຫ້ການປ້ອງກັນ, ຄວບຄຸມ, ວັດແທກແລະວິເຄາະວິທີແກ້ໄຂ ສຳ ລັບເຄື່ອງຈັກໄຟຟ້າແຮງດັນຕ່ ຳ.
ປົກປັກຮັກສາວົງຈອນ
TDHD ໃຫ້ການປ້ອງກັນເກີນ ກຳ ລັງ ສຳ ລັບມໍເຕີທີ່ເກີດຈາກກະແສໄຟຟ້າ interphase. ການປ້ອງກັນປະກອບດ້ວຍອົງປະກອບທີ່ເກີນຄວາມເປັນເອກະລາດ, ແຕ່ລະອົງປະກອບສາມາດເລີ່ມຕົ້ນແຍກຕ່າງຫາກ, ແລະເວລາປະຕິບັດງານສາມາດ ກຳ ນົດຕາມສະຖານະການສະເພາະຢູ່ໃນສະຖານທີ່.
ການປ້ອງກັນທີ່ມີລັອກ-rotor
ໃນຂະບວນການແລ່ນມໍເຕີໂດຍການເຮັດຄວາມຮ້ອນເກີນອົງປະກອບເພື່ອໃຫ້ການປ້ອງກັນ, ໃນຂະບວນການເລີ່ມຕົ້ນມໍເຕີໂດຍການຮັບຮູ້ໂດຍອັດຕະໂນມັດກ່ຽວກັບການປ່ຽນແປງໃນປະຈຸບັນເພື່ອໃຫ້ການປົກປ້ອງ, ນີ້ສາມາດເປັນເວລາດົນນານທີ່ຈະເລີ່ມຕົ້ນມໍເຕີແລະບໍ່ອະນຸຍາດໃຫ້ຂັ້ນຕອນການສະກັດເວລາ ໝູນ ວຽນໃຫ້ໄວ ການປ້ອງກັນ. ຖ້າການຫຼຸດລົງໃນປະຈຸບັນບໍ່ສາມາດເຫັນໄດ້ຊັດເຈນໃນລະຫວ່າງການເລີ່ມຕົ້ນຂອງມໍເຕີ, ການປ້ອງກັນການສະກັດກັ້ນຈະຖືກເລີ່ມຕົ້ນ, ແລະການປ້ອງກັນການປິດກັ້ນຍັງສາມາດຖືກຮັບຮູ້ໂດຍການປ້ອງກັນເກີນ ກຳ ນົດແລະໃຫ້ການປ້ອງກັນ.
ການປົກປ້ອງເກີນໄປ
ໃນເວລາທີ່ຄວາມສາມາດຄວາມຮ້ອນໄດ້ບັນລຸ 100%, ການປ້ອງກັນ overload ການເດີນທາງ. ຄວາມສາມາດຄວາມຮ້ອນໄດ້ ນຳ ຜົນກະທົບຄວາມຮ້ອນທີ່ສົມບູນຂອງກະແສໄຟຟ້າໃນທາງບວກແລະລົບເຂົ້າໃນການພິຈາລະນາຢ່າງເຕັມທີ່, ແລະການກວດພົບກະແສປະສິດທິພາບທີ່ແທ້ຈິງຈະຮັບປະກັນການຕອບຮັບທີ່ຖືກຕ້ອງຕໍ່ຜົນກະທົບຄວາມຮ້ອນທີ່ກົມກຽວກັນ. ອົງປະກອບປ້ອງກັນໃຫ້ການປົກປ້ອງ overload ດ້ວຍ ກຳ ນົດເວລາຄົງທີ່ແລະ ກຳ ນົດເວລາຊ້ ຳ ກັນເພື່ອຕອບສະ ໜອງ ຄວາມຕ້ອງການຂອງສະຖານທີ່ຕ່າງໆ.
ການປ້ອງກັນຄວາມບໍ່ສົມດຸນໃນປະຈຸບັນ
TDHD ຕິດຕາມອັດຕາສ່ວນຂອງຄວາມບໍ່ສົມດຸນໃນປະຈຸບັນຂອງມໍເຕີ. ຖ້າຄວາມບໍ່ສົມດຸນໃນປະຈຸບັນຂອງໄລຍະນີ້ສູງກວ່າມູນຄ່າການແຈ້ງເຕືອນແລະມີເວລາຫຼາຍກວ່າ 5 ວິນາທີ, ຈະມີການແຈ້ງເຕືອນ. ການຫລອກລວງເກີດຂື້ນຖ້າວ່າຄວາມບໍ່ສົມດຸນໃນປະຈຸບັນສູງກວ່າມູນຄ່າການລອຍແລະຍັງຄົງຢູ່ເປັນເວລາຫຼາຍກວ່າ 5 ວິນາທີ.
ພາຍໃຕ້ການປ້ອງກັນແຮງດັນ
ສຳ ລັບພາລະທີ່ມີຄວາມແຮງຂອງແຮງດັນໄຟຟ້າ (ເຊັ່ນມໍເຕີໄຟຟ້າ), ການຫຼຸດລົງຂອງແຮງດັນໄຟຟ້າຈະເຮັດໃຫ້ກະແສການດູດຊືມສູງຂື້ນ, ເຊິ່ງອາດຈະເຮັດໃຫ້ເກີດຄວາມຮ້ອນເກີນໄປທີ່ອັນຕະລາຍໃນມໍເຕີ. ໃນເວລາທີ່ແຮງດັນຫຼຸດລົງໃນການຕັ້ງຄ່າແຮງດັນໄຟຟ້າທີ່ ກຳ ນົດໄວ້, ຫຼັງຈາກການຊັກຊ້າເວລາທີ່ ກຳ ນົດໄວ້ແລ້ວ, ການປ້ອງກັນ undervoltage ຈະອອກ ຄຳ ເຕືອນຫລື ຄຳ ສັ່ງເດີນທາງ.
ເກີນການປ້ອງກັນແຮງດັນ
ສຳ ລັບມໍເຕີທີ່ແລ່ນຢູ່ພາຍໃຕ້ການໂຫຼດຄົງທີ່, ແຮງດັນໄຟຟ້າແຮງເກີນສາມາດເຮັດໃຫ້ກະແສໄຟຟ້າຫຼຸດລົງ. ເຖິງຢ່າງໃດກໍ່ຕາມ, ການເພີ່ມຂື້ນຂອງການສູນເສຍທາດເຫຼັກແລະການບໍລິໂພກທອງແດງຈະເຮັດໃຫ້ມໍເຕີຮ້ອນ. ໃນກໍລະນີນີ້ການຍົກຍ້າຍເກີນ ກຳ ນົດໃນປະຈຸບັນຈະບໍ່ ດຳ ເນີນງານແລະຈະບໍ່ໃຫ້ການປົກປ້ອງທີ່ພຽງພໍ, ສະນັ້ນ, ສ່ວນປະກອບເກີນ ກຳ ລັງນີ້ຈະຊ່ວຍປ້ອງກັນມໍເຕີໃນກໍລະນີທີ່ແຮງດັນເກີນ ກຳ ລັງຕໍ່ເນື່ອງ.

ການປ້ອງກັນໂລກ / ການຮົ່ວໄຫຼ
ມູນຄ່າຄວາມຜິດຂອງພື້ນທີ່ຖືກວັດແທກເປັນເປີເຊັນຂອງມູນຄ່າ CT ປະຖົມ. ການຊອກຄົ້ນຫາດິນໃນປະຈຸບັນໂດຍອີງໃສ່ໂຄງການ CT-zero-sequence. ເພື່ອປ້ອງກັນການແຈ້ງເຕືອນທີ່ບໍ່ຖືກຕ້ອງທີ່ເກີດຈາກກະແສໄຟຟ້າ inrush ໃນທັນທີ, ການຊັກຊ້າເວລາສາມາດຕັ້ງຄ່າໃນ ໜ້າ ທີ່ນີ້. ຟັງຊັນປ້ອງກັນໃຫ້ການແຈ້ງເຕືອນຄວາມຜິດຂອງພື້ນດິນຫລືການເດີນທາງຜິດ, ເຊິ່ງສາມາດໃຫ້ການແຈ້ງເຕືອນລ່ວງ ໜ້າ ກ່ຽວກັບຄວາມເສຍຫາຍຂອງການສນວນ.
ການປ້ອງກັນສໍາລັບເວລາເລີ່ມຕົ້ນທີ່ຍາວເກີນໄປ
ອຸປະກອນຈະລະບຸຂະບວນການເລີ່ມຕົ້ນຂອງມໍເຕີໂດຍອັດຕະໂນມັດ. ຖ້າມໍເຕີບໍ່ ສຳ ເລັດການເລີ່ມຕົ້ນພາຍໃນເວລາເລີ່ມຕົ້ນທີ່ລະບຸ, ການປະຕິບັດການປ້ອງກັນຈະຖືກປະຕິບັດ.
Undervoltage restarts ອັດຕະໂນມັດ
ເມື່ອຟັງຊັນນີ້ຖືກເປີດໃຊ້ງານ, ຫຼັງຈາກທີ່ມໍເຕີຂາດ ກຳ ລັງໃນທັນທີ, ມັນເລີ່ມເວລານັບແຕ່ເລີ່ມຕົ້ນ. ຖ້າຫລັງຈາກການປະຕິບັດການປ້ອງກັນແຮງດັນຕ່ ຳ, ແຮງດັນໄຟຟ້າຈະຖືກສົ່ງກັບຄືນສູ່ຫລາຍກ່ວາ 90% ຂອງແຮງດັນທີ່ຖືກຈັດອັນດັບກ່ອນ ກຳ ນົດເວລາເລີ່ມຕົ້ນດ້ວຍຕົນເອງ, ຫຼັງຈາກນັ້ນເຄື່ອງປັ່ນໄຟປິດບັນຍັດ.
ເລີ່ມການເຮັດວຽກຄວບຄຸມ
TDHD ສາມາດໃຊ້ກັບຮູບແບບການເລີ່ມຕົ້ນຕໍ່ໄປນີ້
start ເລີ່ມຕົ້ນໂດຍກົງ
starting ເລີ່ມຕົ້ນສອງທາງ
ta ເຂດແດນດາວເລີ່ມ
■ເລີ່ມຕົ້ນ autotransformer
function ລະບົບເລີ່ມແກວໄຟຟ້າ
resistance ຊຸດຄວາມຕ້ານທານເລີ່ມຕົ້ນ
ການປ້ອນຂໍ້ມູນເຂົ້າ
device ອຸປະກອນປ້ອງກັນມໍເຕີສະ ໜອງ ການປ້ອນຂໍ້ມູນປະລິມານການຫັນປ່ຽນ 8 ວິທີແລະສາມາດຂະຫຍາຍໄດ້ສູງສຸດ 11 ວິທີການປ້ອນຂໍ້ມູນປະລິມານ
input ການປ້ອນຂໍ້ມູນແບບ optical, ວັດສະດຸປ້ອນ node ແຫ້ງ
■ ສຳ ລັບຜູ້ຕິດຕໍ່ເລີ່ມຕົ້ນ, ຢຸດ / ປັບ ໃໝ່, ຢູ່ໃນທ້ອງຖິ່ນ / ຫ່າງໄກສອກຫຼີກ, ການເຊື່ອມໂຍງຂະບວນການແລະການສະແດງສະຖານະການປ່ຽນທົ່ວໄປ
panel ກະດານຜລຶກຂອງແຫຼວທີ່ມີຕົວຊີ້ວັດສະຫຼັບ
Relay ຜົນຜະລິດ
expansion ການຂະຫຍາຍສູງສຸດ ສຳ ລັບ 5 ຜົນຕໍ່ການສົ່ງຕໍ່
capacity ຄວາມສາມາດຕິດຕໍ່: AC250V / 5A DC30V / 5A
■ ສຳ ລັບການເດີນທາງ, ການແຈ້ງເຕືອນ, ການເລີ່ມຕົ້ນແລະຜົນຜະລິດຫ່າງໄກສອກຫຼີກ
panel ກະດານ LCD ທີ່ມີການເປີດ / ປິດການເປີດເຜີຍຕົວຊີ້ວັດ
ບັນນາທິການປະຫວັດການພັດທະນາ
ຫຼັງຈາກການສ້າງຕັ້ງສາທາລະນະລັດປະຊາຊົນຈີນ, ທີມເຕັກໂນໂລຢີການປົກປ້ອງການສົ່ງຕໍ່ຂອງຈີນຈາກປະກົດການຫຍໍ້ທໍ້, ໃນເວລາປະມານ 10 ປີໃນປະມານເຄິ່ງສະຕະວັດຜ່ານເສັ້ນທາງຂອງບັນດາປະເທດກ້າວ ໜ້າ.
ເຄື່ອງປ້ອງກັນມໍເຕີແຮງດັນຕ່ ຳ
ເຄື່ອງປ້ອງກັນມໍເຕີທີ່ມີແຮງດັນຕໍ່າ (1 ຊິ້ນ)
ໃນປີ 1958, ນັກວິຊາການຈີນໄດ້ສ້າງສັນ, ການຍ່ອຍແລະຄວາມ ຊຳ ນານດ້ານເຕັກໂນໂລຢີການປະຕິບັດງານແລະການປະຕິບັດງານຂອງອຸປະກອນປ້ອງກັນ Relay ທີ່ກ້າວ ໜ້າ ຈາກຕ່າງປະເທດ, ແລະໄດ້ສ້າງຕັ້ງຜູ້ຜະລິດ relay ມືອາຊີບຄັ້ງ ທຳ ອິດ - ໂຮງງານ acay relay, ເຊິ່ງເປັນຂີດ ໝາຍ ການ ກຳ ເນີດຂອງອຸດສາຫະ ກຳ Relay ແຫ່ງຊາດຂອງຈີນ.
ໃນຊຸມປີ 1960, ຈີນໄດ້ສ້າງລະບົບການຄົ້ນຄວ້າການອອກແບບ, ການຜະລິດ, ການຜະລິດ, ການ ດຳ ເນີນງານແລະການສິດສອນທີ່ສົມບູນ. ໂດຍພື້ນຖານແລ້ວ ສຳ ລັບໄຟຟ້າ, ປະເພດແກ້ໄຂ.
ຕັ້ງແຕ່ກາງຊຸມປີ 1960 ເຖິງກາງຊຸມປີ 1980, ການປ້ອງກັນຕົວສົ່ງສັນຍານ transistor ຈະເລີນຮຸ່ງເຮືອງແລະໄດ້ຮັບຮອງເອົາ.
ຊຸມປີ 80s ແລະຕົ້ນປີ 90s. ການປ້ອງກັນວົງຈອນລວມໄດ້ປະກອບເປັນຊຸດຄົບຊຸດ, ຄ່ອຍໆປ່ຽນແທນການປ້ອງກັນ transistor.
ຕັ້ງແຕ່ຊຸມປີ 1990, ເຕັກໂນໂລຢີການປ້ອງກັນການສົ່ງຕໍ່ຂອງຈີນໄດ້ເຂົ້າສູ່ຍຸກແຫ່ງການປົກປ້ອງຈຸລະພາກ. ໃນປີ 1984, ອຸປະກອນປ້ອງກັນຈຸລະພາກ ສຳ ລັບລະບົບສາຍສົ່ງທີ່ພັດທະນາໂດຍສະຖາບັນພະລັງງານໄຟຟ້າພາກ ເໜືອ ຂອງຈີນໄດ້ຮັບການຕີລາຄາເປັນຄັ້ງ ທຳ ອິດ. ການປົກປ້ອງເຄື່ອງຈັກແລະການປົກປ້ອງກຸ່ມ ໝໍ້ ແປງໄຟຟ້າຍັງໄດ້ຜ່ານການປະເມີນຜົນຢ່າງ ສຳ ເລັດຜົນໃນປີ 1989 ແລະປີ 1994.
ໃນທ້າຍປີ 2006, ອັດຕາສ່ວນຂອງອຸປະກອນ microcomputer ຂອງເຄື່ອງປ້ອງກັນສົ່ງຕໍ່ 220kV ແລະສູງກວ່າລະບົບແມ່ນ 91.41%.
ໃນປະຈຸບັນ, ການພັດທະນາການປົກປ້ອງສາຍສົ່ງພາຍໃນປະເທດໄດ້ບັນລຸຫຼືເກີນລະດັບຂອງອຸດສາຫະ ກຳ ດຽວກັນໃນຕ່າງປະເທດທັງໃນດ້ານເຕັກນິກຮາດແວແລະຊອບແວແລະຫຼັກການປົກປ້ອງ.
ໃນປີ 2006, ອັດຕາການປະຕິບັດທີ່ຖືກຕ້ອງຂອງເຄື່ອງມືປ້ອງກັນລະບົບຕໍ່ລະບົບ ac ຂອງບໍລິສັດຕາຂ່າຍໄຟຟ້າຂອງລັດແມ່ນ 99.97%.
ເມື່ອປຽບທຽບກັບການປ້ອງກັນສາຍໄມໂຄຣຄອມພິວເຕີ້ສາຍ, ອຸປະກອນຕົ້ນຕໍ (ລົດເມ, ໝໍ້ ແປງໄຟຟ້າແລະອື່ນໆ), ເຖິງແມ່ນວ່າຈະເລີ່ມຕົ້ນຊ້າ, ພາຍຫຼັງການຄົ້ນຄວ້າມາເປັນເວລາຫຼາຍປີໄດ້ເຮັດໃຫ້ມີຄວາມກ້າວ ໜ້າ ພໍໃຈ. ເຫດຜົນຕົ້ນຕໍ ສຳ ລັບການກະ ທຳ ທີ່ບໍ່ ໝັ້ນ ຄົງຂອງການປົກປ້ອງສ່ວນປະກອບ:
ຫຼັກການປົກປ້ອງອົງປະກອບແລະສາຍໄຟສະລັບສັບຊ້ອນ. ເນື່ອງຈາກວ່າແຕ່ລະດ້ານຂອງ ໝໍ້ ແປງບໍ່ແມ່ນສາຍພົວພັນໄຟຟ້າທີ່ລຽບງ່າຍ, ມີສາຍພົວພັນການຈັບຄູ່ແມ່ເຫຼັກ, ສະນັ້ນວິທີການ ຈຳ ແນກການຫັນປ່ຽນການສະກົດຈິດທີ່ມີຢູ່ໃນກະແສໄຟຟ້າແລະກະແສໄຟຟ້າຜິດປົກກະຕິແມ່ນການປົກປ້ອງ ໝໍ້ ແປງບໍ່ໄດ້ດີຫຼາຍໃນການແກ້ໄຂບັນຫາ; ມີອຸປະກອນທີ່ກ່ຽວຂ້ອງຫຼາຍຢ່າງໃນການປົກປ້ອງລົດເມ, ສາຍໄຟແມ່ນສະລັບສັບຊ້ອນ, ມັນບໍ່ແມ່ນເລື່ອງງ່າຍທີ່ຈະສ້ອມແປງ, ແລະເຕັກໂນໂລຢີຂອງການປ້ອງກັນລົດເມຕໍ່ກັບການອີ່ມຕົວຂອງ ໝໍ້ ແປງໄຟຟ້າໃນປະຈຸບັນແມ່ນບໍ່ແກ່ຫຼາຍ.
(2) ການປົກປ້ອງອົງປະກອບຂອງຈຸລະພາກຄອມພິວເຕີຂອງການເລີ່ມຕົ້ນແລະການສົ່ງເສີມຜູ້ຊ່ຽວຊານດ້ານການປ້ອງກັນແລະຜູ້ໃຫ້ບໍລິການຊ້າ, ຜູ້ໃຫ້ບໍລິການດ້ານການປະຕິບັດງານເນື່ອງຈາກວ່າສ່ວນປະກອບ microcomputer ປົກປ້ອງແລະປະລິນຍາໂທບໍ່ພຽງພໍ, ປະສົບການພຽງເລັກນ້ອຍໃນການ ດຳ ເນີນງານການ ບຳ ລຸງຮັກສາແລະການ ດຳ ເນີນງານຫຼາຍບັນຫາ
(3) ໝໍ້ ແປງໄຟ ໜ້ອຍ, ເວລາເກີດຄວາມຜິດຂອງລົດເມ, ຈຳ ນວນການປະຕິບັດການປົກປ້ອງສ່ວນປະກອບແມ່ນຂ້ອນຂ້າງ ໜ້ອຍ, ຕົວຢ່າງສະຖິຕິແມ່ນ ໜ້ອຍ, ອັດຕາການປະຕິບັດທີ່ຖືກຕ້ອງຂອງສະຖິຕິການປົກປ້ອງອົງປະກອບມີລະດັບຄວາມແນ່ນອນແລະການສຸ່ມ.
ການປົກປ້ອງ dc ຂອງຈີນ, ເຖິງປະຈຸບັນ, ສິບປີແຫ່ງການປະຕິບັດງານ. ໂດຍລວມ, ເສັ້ນໂຄ້ງຂອງອັດຕາການປະຕິບັດທີ່ຖືກຕ້ອງມີຄວາມຜັນຜວນຢ່າງຫຼວງຫຼາຍ. ສາເຫດຕົ້ນຕໍແມ່ນ: ເທັກໂນໂລຢີປ້ອງກັນ dc ຖືກແນະ ນຳ ມາຊ້າ, ຈຳ ນວນ ຄຳ ຮ້ອງສະ ໝັກ ວິສະວະ ກຳ ແມ່ນນ້ອຍ, ເຕັກໂນໂລຢີປ້ອງກັນ dc, ລະດັບການ ດຳ ເນີນງານແລະການ ບຳ ລຸງຮັກສາແມ່ນບໍ່ແກ່; ຄວາມຖີ່ຂອງການປະຕິບັດການປ້ອງກັນ dc ແມ່ນ ໜ້ອຍ, ຕົວຢ່າງສະຖິຕິແມ່ນ ໜ້ອຍ, ສະຖິຕິຂໍ້ມູນມີຄວາມສອດຄ່ອງແນ່ນອນ
ປົກປັກຮັກສາວົງຈອນ
■ການປ້ອງກັນການປ້ອງກັນ
protection ການປ້ອງກັນເກີນເວລາ ຈຳ ກັດ
protection ການປ້ອງກັນເກີນເວລາ
■ໄລຍະປົກປ້ອງທີ່ບໍ່ສົມດຸນໃນປະຈຸບັນ
protection ປ້ອງກັນພັກຜ່ອນໄລຍະ
■ພາຍໃຕ້ການປ້ອງກັນແຮງດັນ
protection ການປ້ອງກັນ overvoltage
protection ປ້ອງກັນພື້ນດິນ / ຮົ່ວ
ມໍເຕີແຮງດັນຕ່ ຳ
ມໍເຕີແຮງດັນຕໍ່າ (1)
■ປົກປ້ອງໃນເວລາເລີ່ມຕົ້ນທີ່ໃຊ້ເວລາດົນເກີນໄປ
■ແກວ່ງໄຟເພື່ອເລີ່ມຕົ້ນ
■ການເຊື່ອມໂຍງຂັ້ນຕອນ
protection ປົກປ້ອງເວລາ
ການຕິດຕາມແລະວັດແທກ
parameters ຕົວກໍານົດການປະຕິບັດງານຂອງມໍເຕີແລະຂໍ້ມູນປະຫວັດສາດ
data ຂໍ້ມູນຂັ້ນຕອນການເຮັດວຽກ
■ສະແດງຕົວກໍານົດໄຟຟ້າພະລັງງານເຕັມ
■ປ່ຽນສະຖານະການປ້ອນຂໍ້ມູນປະລິມານແລະສະຖານະການສົ່ງຕໍ່
information ຂໍ້ມູນບັນທຶກເຫດການ
records ບັນທຶກການ ບຳ ລຸງຮັກສາ
ການສື່ສານ
interface ໂຕ້ຕອບການສື່ສານ rs485 / 232
prot ອະນຸສັນຍາການສື່ສານ modbus-rtu
ມໍເຕີແຮງດັນຕ່ ຳ ໝາຍ ເຖິງແຮງດັນ ac ຂອງມໍເຕີຕ່ ຳ ກວ່າ 1000V, ໂດຍທົ່ວໄປ ໝາຍ ເຖິງມໍເຕີ AC 380V, 440V ຫຼື 660V ແລະຫ້ອງຮຽນອື່ນໆຂອງການ ນຳ ໃຊ້ມໍເຕີ asynchronous ຕົວຈິງແມ່ນຂ້ອນຂ້າງ ໜ້ອຍ. ມໍເຕີໄຟຟ້າແຮງດັນຕ່ ຳ ແບ່ງອອກເປັນມໍເຕີມໍເຕີມໍເຕີແລະມໍເຕີມໍເຕີ. ມໍເຕີ Asynchronous ແມ່ນກ່ຽວຂ້ອງກັບມໍເຕີ synchronous. ສູດ ສຳ ລັບການຄິດໄລ່ຄວາມໄວແບບຄົບວົງຈອນຂອງມໍເຕີ synchronous ແມ່ນ n0 = 60f / p. F ແມ່ນຄວາມຖີ່ຂອງພະລັງງານແລະ p ແມ່ນໂລຫະປະເພດຂົ້ວຂອງມໍເຕີ. ຂໍ້ດີ: 1. ໂຄງປະກອບງ່າຍດາຍ, ການ ດຳ ເນີນງານທີ່ ໜ້າ ເຊື່ອຖື, ການ ນຳ ໃຊ້ກ້ວາງ; 2. ການຜະລິດແລະການຮັກສາທີ່ສະດວກ; 3. ຄຸນລັກສະນະການເຮັດວຽກທີ່ດີ; 4. ຕົ້ນທຶນຕໍ່າ. ຂໍ້ເສຍປຽບ: 1. ຈຳ ກັດໂດຍກະແສປະຕິບັດການ, ຄວາມສາມາດບໍ່ສາມາດໃຫຍ່ເກີນໄປ; 2. ການປ້ອງກັນມໍເຕີໂດຍທົ່ວໄປແມ່ນຂ້ອນຂ້າງງ່າຍດາຍ, ງ່າຍຕໍ່ການ ທຳ ລາຍ; 3. ມໍເຕີໄຟຟ້າແຮງດັນຕ່ ຳ ທີ່ມີຄວາມສາມາດສູງມີອິດທິພົນຫລາຍຕໍ່ລະບົບເມື່ອມັນເລີ່ມຕົ້ນ.
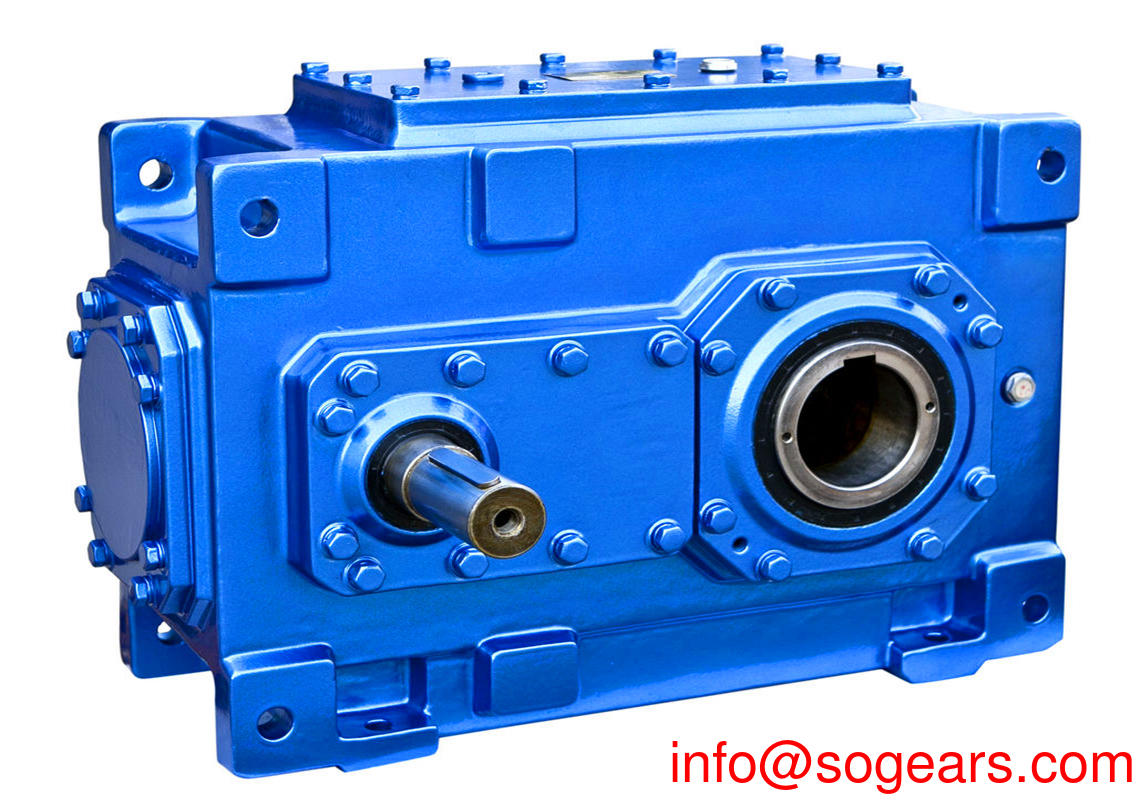
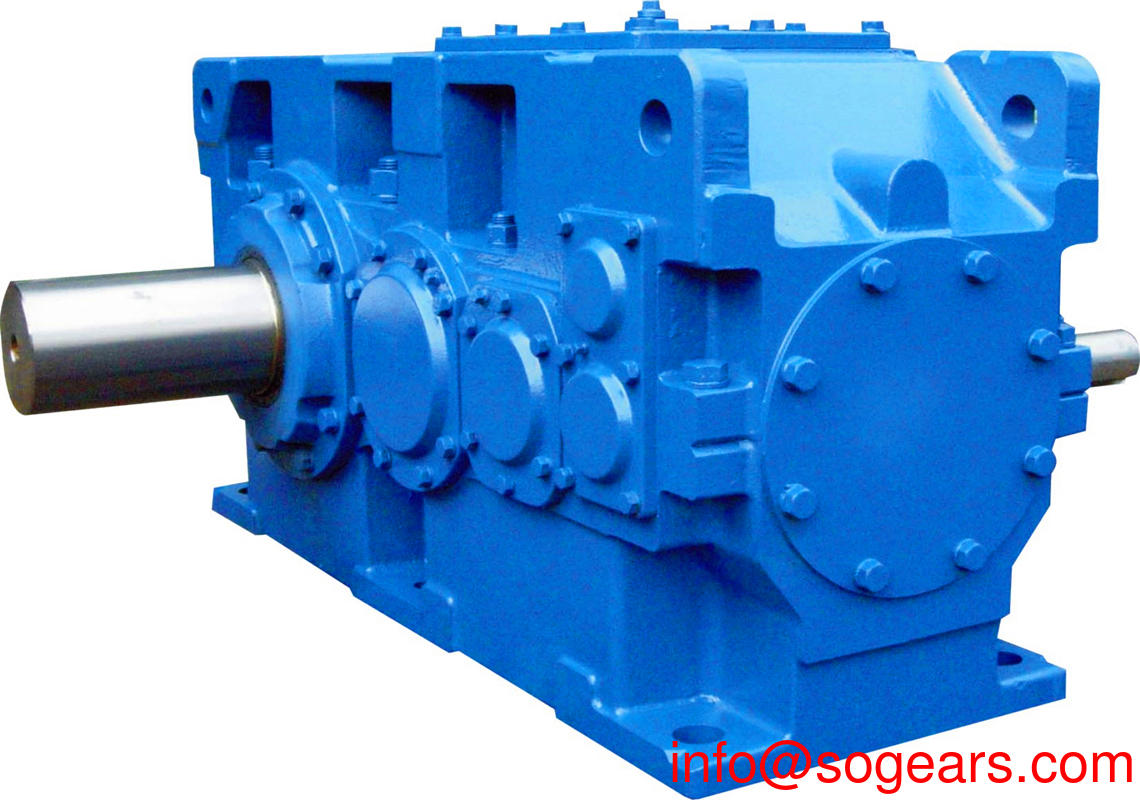
ມໍເຕີແຮງດັນໄຟຟ້າສູງ ໝາຍ ເຖິງມໍເຕີທີ່ມີແຮງດັນໄຟຟ້າສູງກວ່າ 10000v. 6000V ແລະ 10000v ແມ່ນໃຊ້ກັນທົ່ວໄປ. ຍ້ອນວ່າຕາຂ່າຍໄຟຟ້າຕ່າງກັນຢູ່ຕ່າງປະເທດ, ມີລະດັບແຮງດັນ 3300v ແລະ 6600v. ເຄື່ອງຈັກແຮງດັນໄຟຟ້າແຮງສູງສາມາດໃຊ້ເພື່ອຂັບເຄື່ອງຈັກຕ່າງໆ. ນີ້ແມ່ນຄວາມແຕກຕ່າງລະຫວ່າງມໍເຕີທີ່ມີແຮງດັນສູງແລະມໍເຕີແຮງດັນຕ່ ຳ. ມໍເຕີແຮງດັນໄຟຟ້າແຮງສູງແລະມໍເຕີແຮງດັນຕ່ ຳ ມີຂໍ້ດີແລະຂໍ້ເສຍຂອງຕົນເອງ. ຂໍ້ດີແລະຂໍ້ເສຍຂອງພວກເຂົາແມ່ນຫຍັງ
ເມື່ອປຽບທຽບກັບມໍເຕີທີ່ມີແຮງດັນຕ່ ຳ, ເຄື່ອງຈັກທີ່ມີແຮງດັນສູງມີຂໍ້ດີຕໍ່ໄປນີ້:
1. ຫ້ອງສະ ໝຸດ ສາມາດເພີ່ມພະລັງງານຂອງມໍເຕີເຊິ່ງສາມາດບັນລຸໄດ້ຫລາຍພັນຄົນ, ແມ້ກະທັ້ງຫລາຍສິບພັນກິໂລວັດ. ນີ້ແມ່ນຍ້ອນວ່າ, ໃນເວລາດຽວກັນກັບຜົນຜະລິດໄຟຟ້າ, ກະແສໄຟຟ້າແຮງສູງແມ່ນມີຂະ ໜາດ ນ້ອຍກ່ວາມໍເຕີທີ່ມີແຮງດັນຕໍ່າ. ຍົກຕົວຢ່າງ, ກະແສໄຟຟ້າທີ່ ກຳ ລັງຖືກຈັດອັນດັບ 500kW, 4 AC ສາມມິຕິ AC ແມ່ນປະມານ 900A ໃນເວລາທີ່ແຮງດັນໄຟຟ້າແມ່ນ 380V, ແລະມີພຽງແຕ່ປະມານ 30A ເມື່ອແຮງດັນໄຟຟ້າແມ່ນ 10kV. ດັ່ງນັ້ນລົມຂອງມໍເຕີໄຟຟ້າແຮງສູງສາມາດໃຊ້ເສັ້ນຜ່າກາງສາຍນ້ອຍ. ເພາະສະນັ້ນ, ການສູນເສຍທອງແດງ stator ຂອງມໍເຕີແຮງດັນໄຟຟ້າແຮງສູງແມ່ນນ້ອຍກ່ວາມໍເຕີແຮງດັນຕໍ່າ. ສຳ ລັບມໍເຕີໄຟຟ້າແຮງສູງ, ເມື່ອ ນຳ ໃຊ້ພະລັງງານໄຟຟ້າແຮງດັນຕ່ ຳ, ພື້ນທີ່ກ້ວາງຂອງ stator ແມ່ນມີຄວາມ ຈຳ ເປັນຍ້ອນຄວາມຕ້ອງການຂອງ conductor ທີ່ ໜາ ກວ່າ, ເຊິ່ງເຮັດໃຫ້ເສັ້ນຜ່າສູນກາງຂອງແກນ stator ຂະ ໜາດ ໃຫຍ່ແລະປະລິມານຂອງມໍເຕີທັງ ໝົດ ມີຂະ ໜາດ ໃຫຍ່.
2. ສຳ ລັບມໍເຕີທີ່ມີຄວາມສາມາດຂະ ໜາດ ໃຫຍ່, ອຸປະກອນການສະ ໜອງ ແລະແຈກຈ່າຍພະລັງງານທີ່ ນຳ ໃຊ້ໂດຍມໍເຕີໄຟຟ້າແຮງສູງແມ່ນ ໜ້ອຍ ກ່ວາການລົງທືນໂດຍລວມຂອງລົດຈັກໄຟຟ້າແຮງດັນຕ່ ຳ, ແລະການສູນເສຍສາຍແມ່ນນ້ອຍ, ເຊິ່ງສາມາດປະຫຍັດພະລັງງານທີ່ແນ່ນອນ. ໂດຍສະເພາະ, ເຄື່ອງຈັກແຮງດັນໄຟຟ້າແຮງສູງ 10kv ສາມາດ ນຳ ໃຊ້ຕາຂ່າຍໄຟຟ້າໂດຍກົງ, ສະນັ້ນການລົງທືນໃສ່ອຸປະກອນພະລັງງານຈະ ໜ້ອຍ ລົງ, ການ ນຳ ໃຊ້ຈະກາຍເປັນແບບງ່າຍດາຍ, ແລະອັດຕາການລົ້ມເຫຼວຈະກາຍເປັນນ້ອຍລົງ.








































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}